Каким свойством обладает сила
 Механическое взаимодействие – один из видов взаимодействия материи, способный вызвать изменение механического движения материальных тел.
Механическое взаимодействие – один из видов взаимодействия материи, способный вызвать изменение механического движения материальных тел.
Сила характеризует количественную сторону механического взаимодействия. Таким образом, когда говорят, что на тело действуют силы, то это значит, что на него воздействуют другие тела (или физические поля). Не всегда, впрочем, сила действительно приводит к изменению движению тела; такое изменение может блокироваться действием других сил. С учетом сказанного запишем:
Сила (ньютонова) – мера механического воздействия на некото- рое материальное тело со стороны другого материального тела (или физического поля); она характеризует интенсивность и направление этого воздействия. Это, разумеется, не определение, а лишь пояснение к понятию силы. Поскольку понятие силы – фундаментальное, то его точный смысл раскрывается в аксиомах механики.
Пока же мы отметим вот что. Оговорка “ньютонова” сделана потому, что в динамике мы встретимся с другими величинами, также именуемыми силами, которые, однако, не являются мерами механического взаимодействия. В этом же семестре речь будет идти именно о ньютоновых силах, и мы для краткости будем называть их просто силами.
Далее, под словом “мера” в механике и в физике понимается физическая величина, которая служит для количественного описания какого-либо свойства или отношения. В данном случае речь идет об описании именно механического взаимодействия (а бывают еще, как Вы знаете, и другие взаимодействия – тепло- вые, химические и прочие).
В физике элементарных частиц выделяют четыре фундаментальных взаимодействия: сильное, электромагнитное, слабое и гравитационное. Эти четыре взаимодействия лежат в основе всех наблюдаемых явлений – относящихся как к механике, так и к другим разделам естествознания.
Однако в макромире фундаментальные взаимодействия проявляются, как правило, опосредованно, и нам приходится иметь дело со значительно более широким перечнем взаимодействий (уже не обязательно фундаментальных). Если говорить о механических взаимодействиях, то речь может идти о силах различного происхождения.
Примеры сил: силы тяжести, силы упругости, архимедовы силы, силы сопротивления среды и др. В большинстве задач механики, впрочем, физическая природа тех или иных сил обычно интереса не представляет.
Ещe мы, поясняя понятие силы, говорили об интенсивности и направлении воздействия. Это означает, что сила является векторной величиной. Именно, это – вектор, приложенный к определeнной точке материального тела. Поэтому можно говорить о таких характеристиках силы.
Сила характеризуется:
1) величиной (модулем);
2) направлением;
3) точкой приложения.
К сожалению, на экзамене нередко приходится встречаться с полным пренебрежением к этому правилу. В лучшем случае экзаменатор в этой ситуации поступит так: вздохнет и попросит студента быстренько проставить обозначения векторов в тексте ответа на поставленный вопрос. Если студент не сумеет правильно проставить обозначения – это первый шаг на пути к получению “двойки”. Поэтому, пожалуйста, не игнорируйте в своих конспектах черту, если она написана на доске.
Круглые скобки с запятой в середине обозначают скалярное произведение векторов (запятая при этом разделяет сомножители). Обратите внимание: во многих книгах скалярное произведение обозначается иначе – точкой между век- торами, причем точку обычно можно опустить.
Но мы будем придерживаться именно таких обозначений (они тоже достаточно распространены). Помимо всего прочего, они позволяют избежать путаницы (ведь скалярное произведение векторов нужно отличать от обычного произведения двух скаляров).
Пока мы говорили только о векторе силы. Но понятие силы не сводится к понятию ее вектора. Важна еще и точка приложения силы: ведь если тот же по величине и направлению вектор силы приложить в другой точке тела, то его движение может измениться.
В геометрии принята следующая терминология. Свободный вектор (или просто вектор) – вектор, характеризуемый только модулем и направлением. Связанный вектор – вектор, характеризуемый еще и точкой приложения. Иногда используют такие обозначения.
Через u—.A обозначается связанный вектор, получаемый, если свободный вектор u— приложить в точке A. Обратите внимание: здесь точка пишется не в середине строки (как при умножении чисел), а на ее нижней линии. Таким образом, можно сделать следующий вывод. Итак, сила – связанный вектор (полное обозначение: F—-.A).
Там, где нам потребуется подчеркнуть наличие у силы определенной точки приложения, мы будем пользоваться именно этим полным обозначением. Там, где точка приложения силы будет заранее оговорена, мы будем применять сокращенное обозначение, обозначая силу просто F—- (т.е. так же, как и вектор силы). О точке приложения силы нужно сказать следующее: Если сила действует на материальную точку, то точкой приложения служит сама эта точка.
Если сила действует на материальное тело, то точкой приложения служит точка тела (она может меняться с течением времени). В общем случае точка приложения силы не может лежать вне тела. Если тело – абсолютно твердое, то данное ограничение можно снять; но об этом мы будем говорить позже.
Возникает вопрос: а как можно на практике задать точку приложения силы? Любую точку можно задать, например, ее радиус-вектором, проведенным из некоторого полюса. Полюс – произвольно выделенная точка (положение которой обычно предполагается известным).
Раз здесь говорится “обычно”, то текст в скобках Вы вполне можете игнорировать. Часто бывает так: взяли некоторую точку и объявили ее полюсом (и будет она с этого времени считаться таковым). Но для задания положения точки приложения силы нам как раз нужно знать положение полюса. Можно – но не обязательно – принять за полюс начало системы координат.
Употребляют оба обозначения, но первое предпочтительнее: вектор обозначается одной буквой, а буква “r” напоминает, что речь идет именно о радиус- векторе, или шестью скалярами (Fx , Fy , Fz , xA , yA , zA ). Это – удобно, и так поступают часто. Но задать силу можно также иным способом, который мы рассмотрим в следующем пункте.
Источник
Тестирование онлайн
Что надо знать о силе
Сила – векторная величина. Необходимо знать точку приложения и направление каждой силы. Важно уметь определить какие именно силы действуют на тело и в каком направлении. Сила обозначается как , измеряется в Ньютонах. Для того, чтобы различать силы, их обозначают следующим образом
Ниже представлены основные силы, действующие в природе. Придумывать не существующие силы при решении задач нельзя!
Сил в природе много. Здесь рассмотрены силы, которые рассматриваются в школьном курсе физики при изучении динамики. А также упомянуты другие силы, которые будут рассмотрены в других разделах.
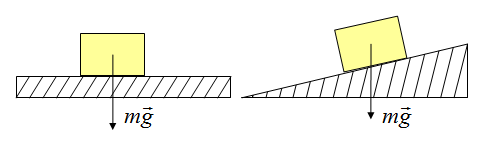
Сила тяжести
На каждое тело, находящееся на планете, действует гравитация Земли. Сила, с которой Земля притягивает каждое тело, определяется по формуле

Точка приложения находится в центре тяжести тела. Сила тяжести всегда направлена вертикально вниз.
Сила трения
Познакомимся с силой трения. Эта сила возникает при движении тел и соприкосновении двух поверхностей. Возникает сила в результате того, что поверхности, если рассмотреть под микроскопом, не являются гладкими, как кажутся. Определяется сила трения по формуле:

Сила приложена в точке соприкосновения двух поверхностей. Направлена в сторону противоположную движению.
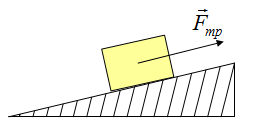
Так как тело представляем в виде материальной точки, силу можно изображать с центра
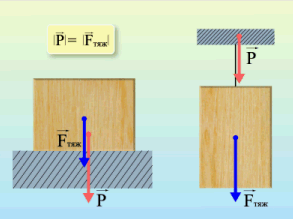
Сила реакции опоры
Представим очень тяжелый предмет, лежащий на столе. Стол прогибается под тяжестью предмета. Но согласно третьему закону Ньютона стол воздействует на предмет с точно такой же силой, что и предмет на стол. Сила направлена противоположно силе, с которой предмет давит на стол. То есть вверх. Эта сила называется реакцией опоры. Название силы “говорит” реагирует опора. Эта сила возникает всегда, когда есть воздействие на опору. Природа ее возникновения на молекулярном уровне. Предмет как бы деформировал привычное положение и связи молекул (внутри стола), они, в свою очередь, стремятся вернуться в свое первоначальное состояние, “сопротивляются”.
Абсолютно любое тело, даже очень легкое (например,карандаш, лежащий на столе), на микроуровне деформирует опору. Поэтому возникает реакция опоры.
Специальной формулы для нахождения этой силы нет. Обозначают ее буквой , но эта сила просто отдельный вид силы упругости, поэтому она может быть обозначена и как
Сила приложена в точке соприкосновения предмета с опорой. Направлена перпендикулярно опоре.
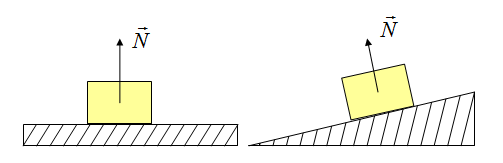
Так как тело представляем в виде материальной точки, силу можно изображать с центра
Сила упругости
Это сила возникает в результате деформации (изменения первоначального состояния вещества). Например, когда растягиваем пружину, мы увеличиваем расстояние между молекулами материала пружины. Когда сжимаем пружину – уменьшаем. Когда перекручиваем или сдвигаем. Во всех этих примерах возникает сила, которая препятствует деформации – сила упругости.
Закон Гука

Сила упругости направлена противоположно деформации.

Так как тело представляем в виде материальной точки, силу можно изображать с центра
При последовательном соединении, например, пружин жесткость рассчитывается по формуле

При параллельном соединении жесткость

Жесткость образца. Модуль Юнга.

Модуль Юнга характеризует упругие свойства вещества. Это постоянная величина, зависящая только от материала, его физического состояния. Характеризует способность материала сопротивляться деформации растяжения или сжатия. Значение модуля Юнга табличное.
Подробнее о свойствах твердых тел здесь.
Вес тела
Вес тела – это сила, с которой предмет воздействует на опору. Вы скажете, так это же сила тяжести! Путаница происходит в следующем: действительно часто вес тела равен силе тяжести, но это силы совершенно разные. Сила тяжести – сила, которая возникает в результате взаимодействия с Землей. Вес – результат взаимодействия с опорой. Сила тяжести приложена в центре тяжести предмета, вес же – сила, которая приложена на опору (не на предмет)!
Формулы определения веса нет. Обозначается эта силы буквой .
Сила реакции опоры или сила упругости возникает в ответ на воздействие предмета на подвес или опору, поэтому вес тела всегда численно одинаков силе упругости, но имеет противоположное направление.

Сила реакции опоры и вес – силы одной природы, согласно 3 закону Ньютона они равны и противоположно направлены. Вес – это сила, которая действует на опору, а не на тело. Сила тяжести действует на тело.
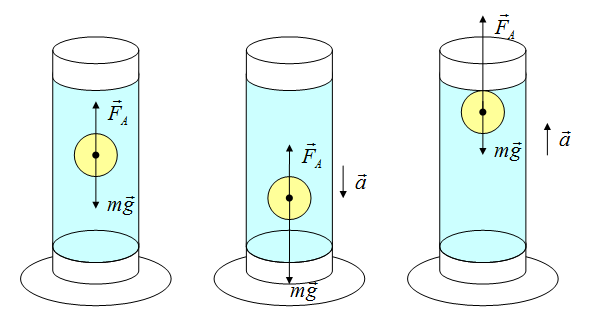
Вес тела может быть не равен силе тяжести. Может быть как больше, так и меньше, а может быть и такое, что вес равен нулю. Это состояние называется невесомостью. Невесомость – состояние, когда предмет не взаимодействует с опорой, например, состояние полета: сила тяжести есть, а вес равен нулю!

Определить направление ускорения возможно, если определить, куда направлена равнодействующая сила
Обратите внимание, вес – сила, измеряется в Ньютонах. Как верно ответить на вопрос: “Сколько ты весишь”? Мы отвечаем 50 кг, называя не вес, а свою массу! В этом примере, наш вес равен силе тяжести, то есть примерно 500Н!
Перегрузка – отношение веса к силе тяжести
Сила Архимеда
Сила возникает в результате взаимодействия тела с жидкость (газом), при его погружении в жидкость (или газ). Эта сила выталкивает тело из воды (газа). Поэтому направлена вертикально вверх (выталкивает). Определяется по формуле:
В воздухе силой Архимеда пренебрегаем.
Если сила Архимеда равна силе тяжести, тело плавает. Если сила Архимеда больше, то оно поднимается на поверхность жидкости, если меньше – тонет.
Электрические силы
Существуют силы электрического происхождения. Возникают при наличии электрического заряда. Эти силы, такие как сила Кулона, сила Ампера, сила Лоренца, подробно рассмотрены в разделе Электричество.
Схематичное обозначение действующих на тело сил
Часто тело моделируют материальной точкой. Поэтому на схемах различные точки приложения переносят в одну точку – в центр, а тело изображают схематично кругом или прямоугольником.
Для того, чтобы верно обозначить силы, необходимо перечислить все тела, с которыми исследуемое тело взаимодействует. Определить, что происходит в результате взаимодействия с каждым: трение, деформация, притяжение или может быть отталкивание. Определить вид силы, верно обозначить направление. Внимание! Количество сил будет совпадать с числом тел, с которыми происходит взаимодействие.
Главное запомнить
1) Силы и их природа;
2) Направление сил;
3) Уметь обозначить действующие силы
Силы трения*
Взаимосвязь силы тяжести, закона гравитации и ускорения свободного падения*
Источник
Что такое “масса”
Слово масса (лат. massa, от др.-греч. μαζα) первоначально в античные времена обозначало кусок теста. Позднее смысл слова расширился, и оно стало обозначать цельный, необработанный кусок произвольного вещества; в этом смысле слово используется, например, у Овидия и Плиния.
Источник: https://sun9-21.userapi.com/cWnyw3_QMGMiAx7bpuYJ6qbWDHK5CGvmwIDOhA/Bqj4E-hF8jo.jpg
Масса как научный термин была введена Ньютоном как мера количества вещества, точнее – материи, до этого естествоиспытатели оперировали понятием веса. В труде «Математические начала натуральной философии» (1687) Ньютон сначала определил «количество материи» в физическом теле как произведение его плотности на объём. Однако, во времена Ньютона, не было ещё чёткого разделения между веществом и материей. В наше время под веществом понимают барионную материю, то есть считают, что барионная материя, состоящая из атомов, называется веществом. А под материей как вещество, так и различные поля, через которые они взаимодействуют, приписывая им энергию и импульс.
Фактически Ньютон использует только два понимания массы: как меры инерции и источника тяготения. Ньютон ввёл массу в законы физики: сначала во второй закон Ньютона, через нее – в первый и третий, а затем — в закон тяготения. В современном понимании в классической механике
1) Масса тела – это физическая величина, которая является мерой инертности тела.
2) Ма́сса — скалярная физическая величина, определяющая инерционные и гравитационные свойства тел в ситуациях, когда их скорость намного меньше скорости света.
Первый закон определяет движение м.т. в отсутствие силы, второй – в присутствии внешней силы:
1. Масса – это мера инерции тела:F = m· w.
2. Третий закон определяет закон равенства действия и противодействия (силы и противосилы) для консервативной системы м.т.: ∑Fi= 0.
3. А затем и в закон тяготения (тел Землей): F = mg, откуда сразу следует, что вес пропорционален массе.
Параметр F называется силой, действующей на м.т. Именно она совместно с массой и ускорением является главным героем всех трех законов Ньютона. Ньютон явно указал на эту пропорциональность и даже проверил её на опыте со всей возможной в те годы точностью: «Определяется масса по весу тела, ибо она пропорциональна весу, что мной найдено опытами над маятниками, произведёнными точнейшим образом» (эти опыты Ньютон подробно описал в III томе своих «Начал»).
Выделенная роль массы, силы и ускорения, а также импульса и энергии, определяется уравнением второго закона Ньютона, в которое входит произведение массы м.т. m на ускорение w = d2r/dt2, получаемое телом при взаимодействии с силовым полем или контактно с другой м.т., и следствиями из них. В этом выражении масса выступает как мера инерции, характеризующей способность изменять скорость под действием внешней силы:
В классической механике в качестве собственных параметров м.т. рассматриваются только скалярная масса m. Импульс скорее является расчетной величиной, чем экспериментально измеряемой. Рассмотрим
Основные их свойства
Левая часть уравнения, определяющего силу взаимодействия F, может зависеть произвольным образом от других параметров м.т. и внешних полей, но обычно порядок дифференциального элемента dnr(t)/dtn для левой части уравнения (2, 3) ограничивается числом n = 1 (иногда 2):
F(m, r, t, , r(t), dr(t)/dt) = mw.
В этом уравнении масса тела определяет чувствительность м.т. к изменению состояния движения под воздействием силы, чувствительной к соответствующему заряду (в т.ч. и массе). Сила, действующая на м.о., обладает свойством аддитивности, и складывается из сил, действующих на каждую ее составную часть:
F = ∑ₖfₖ.
где k – индексы составляющих составной объект м.т.
Масса тела является скаляром и не изменяется при взаимодействиях с внешними полями и между собой (кроме, возможно, случаев рассмотрения неупругого взаимодействия и реактивной силы). Как мера количества вещества, она обладает следующими свойствами:
– масса является мерой количества вещества;
– масса составного тела является аддитивным параметром и равна сумме масс составляющих его частей;
– масса изолированной системы тел сохраняется, не меняется со временем. Как писал М.И.Ломоносов, “ежели где-то что-то убыло, то где-то что-то прибыть должно непременно”.
– масса тела не меняется при переходе от одной системы отсчета к другой, в частности, она одинакова в различных инерциальных системах отсчета.
Масса тела обладает свойством аддитивности. Это означает, что если некоторый материальный объект является составным объектом, но рассматривается как одно целое, то, хотя и каждая составная часть ее взаимодействует с внешним полем (или другими объектами) независимо, ее можно рассматривать как одну м.т. с общей массой и зарядом, находящимся в центре масс (см. законы Ньютона) этих м.т.:
m = ∑ₖmₖ..
При упругих взаимодействиях массы взаимодействующих м.т. не изменяются. При неупругих взаимодействиях двух тел с массами m1 и m2 их массы могут изменяться, но сумма их масс не изменяется. Это же относится и к зарядам м.т.:
Примером неупругого взаимодействия является столкновение двух автомобилей. Еще один интересный пример с противоположным эффектом неупругого взаимодействия – движение ракеты с помощью реактивного двигателя.
Энергия и импульс также обладают свойством аддитивности.
В СТО параметр “масса” имеет две интерпретации. Первое – как скалярный параметр, применяемый в серьезных научных работах, соответствует по значению массе покоя м.т. и обозначается через m. Вторая – как динамическая масса, соответствующая временному элементу 4-х вектора энергии–импульса м.т., отвечающей за полную энергию м.т., поделенной на c2. Динамическая масса применяется в научно-популярной, школьной и частично вузовской учебной литературе. Обозначается тем же символом m, хотя правильнее было бы обозначать как m0 или m0 – эквивалент полной энергии м.т. В СТО эти массы взаимосвязаны и эта связь определяется через модуль полного 4-импульса м.т.:
В ОТО масса м.т. в произвольной точке пространства-времени имеет скалярную массу
Мои странички на Дзен: ВАЛЕРИЙ ТИМИН
Если вам понравилась статья, то поставьте “лайк” и подпишитесь на канал! Если не понравилась – все равно комментируйте и подписывайтесь. Этим вы поможете каналу. И делитесь ссылками в ваших соцсетях!
Если хотите узнать, что обозначает слово или словосочетание, в ОПЕРЕ выделите это слово(сочетание), нажмите правую клавишу мыши и выберите “Искать в …”, далее – “Yandex”. Если это текстовая ссылка – выделите ее, нажмите правую клавишу мыши, выберите “перейти …”. Все! О-ля-ля!
Ссылка на мою статью Как написать формулы в статье на Дзен?
Источник